研究紹介
本研究室では,研究対象に応じて2つのグループに分かれて研究を行なっています.
人センシンググループ
ディジタルカメラや監視カメラなどで撮影した低解像度で低品質な画像や映像から人物の動作や属性,文字などを認識する研究を行う.そして,これらの要素技術を活かした広域監視システムなどの応用技術について研究に取組む.
様々なセンサーを用いた物体認識
人間は可視光によって物体を視認していますが,近年のセンサー技術の発達により,人間が感知できない光量を感知するセンサーや,赤外線などの可視光以外のセンサーも登場しています.
このようなセンサーを効率的に活用する手法を用いる事で,高齢者の見守りシステムへの提案を期待しています.

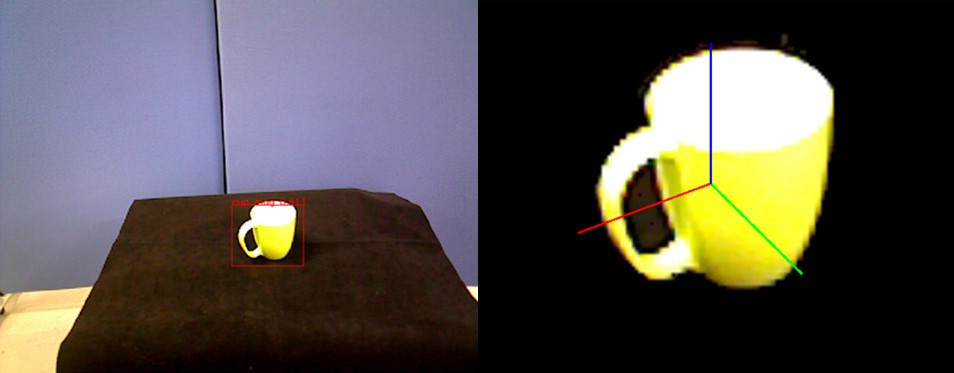
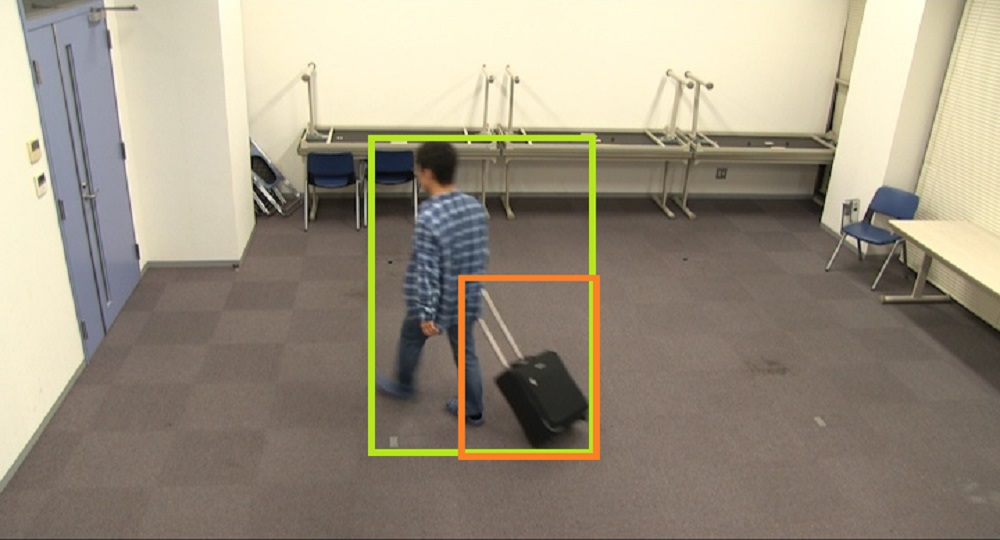
物体姿勢推定
近年,産業分野や生活分野でロボットの開発が進んでおり,ロボットによる物体の持ち運びタスクが重要になっています.
当研究室では,このタスクを可能とするために,画像センサを用いて,物体の認識だけでなくその姿勢を推定する手法も研究しています.
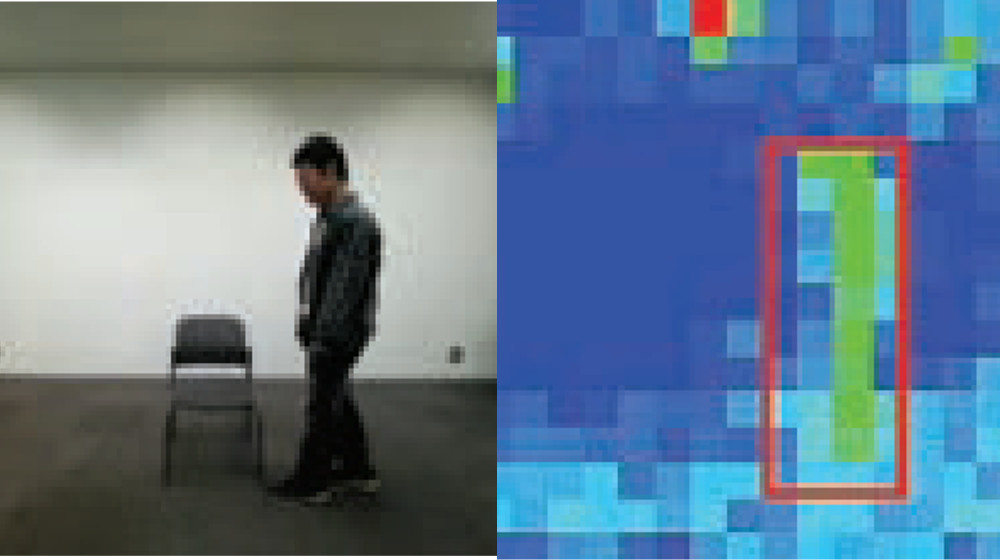
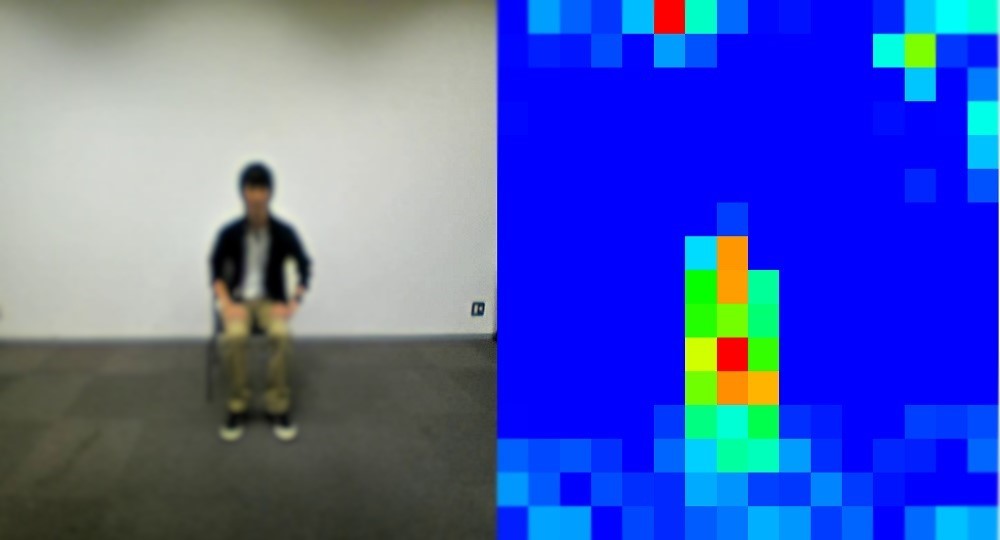
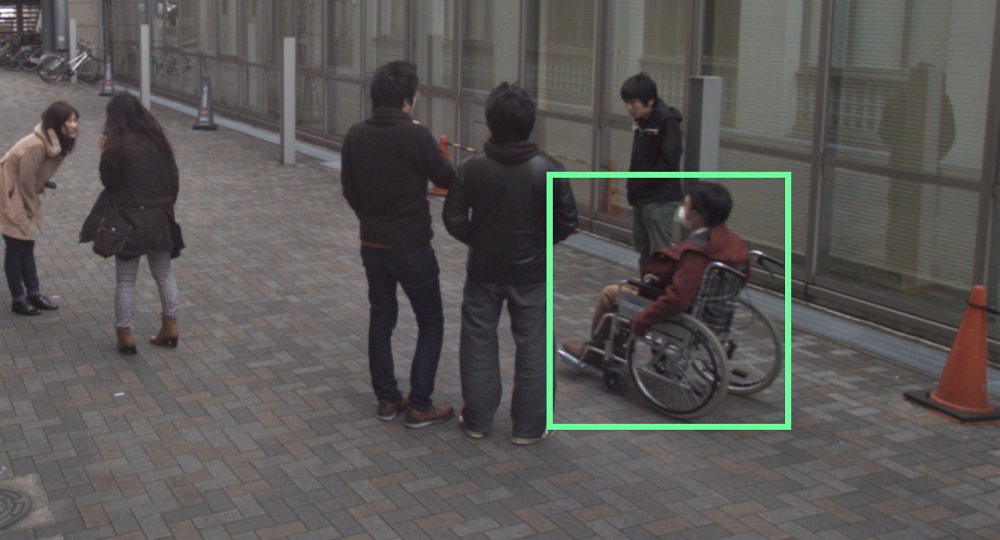
行動に注目した人物認識
視覚障害者が駅ホームから転落する事故を減らすため,監視カメラ映像から白状やそれを使用する際の動作,姿勢を手がかりとし,視覚障害者であるかどうかを認識する研究を行なっています.
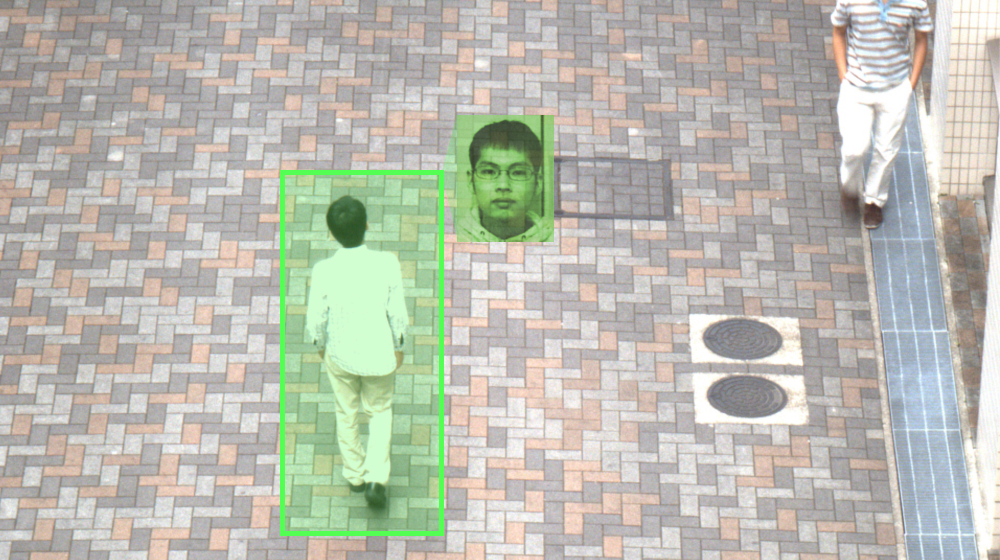
監視カメラの映像から特定の人物を探索する事を考えた時,長時間の映像を人手で確認して探し出すのは膨大な時間と労力が必要になります.
そこで当研究室,監視カメラから得られた大量の画像の中から目的の人物を自動で見つけ出す研究なども行なっています.
環境センシンググループ
自動車に搭載されたカメラやセンサを用いることにより,自車位置推定,障害物検出,地図構築といった環境理解に関する研究を行う.そして,これらの要素技術を活かした高度運転支援システムや自動運転システムといった応用技術について研究に取組む.
セマンティックセグメンテーション
自動運転システムにおいて,周囲環境を正確に認識する必要があります.そのために,車載カメラで撮影された画像に対して,「車」や「歩行者」などの属性のラベルをピクセル単位で与える「セマンティックセグメンテーション」が用いられています.
当研究室では,これを応用して,「歩行者」の属性をさらに分割する研究や走路を自動獲得する研究,そして鉄道沿線設備のセマンティックセグメンテーションを行う研究をしています.

自車位置推定
自動運転システムにおいて,周りの物体との衝突を回避するためには,自車位置を高精度に把握し,回避する物体との相対な距離を正確に測定する必要があります.しかし,GPSでは電波状況による位置の測定誤差などが存在し,自動運転システムに適用する事は難しいのが現状です.
そこで当研究室では,車載カメラによって撮影された画像と一致する画像を,Googleストリートビューのような位置情報付きの画像データベースから探索し,一致した画像の位置情報から自車位置を推測する事で,高精度な自車位置推定を行なう手法を研究しています.
視認性推定
より安全な運転のため,車が発見した歩行者や標識などをドライバーに伝える事によって安全運転を補助するような運転支援システムの実用化が進んでいます.しかしながら,全ての歩行者や標識をドライバーに伝えるのは快適だとは言えません.
そこで,ドライバーから見た歩行者や標識など視認性の高さを推定する事で,見つけにくい対象だけをドライバーに伝達する手法を研究しています.
本研究室では,映像や画像を用いた様々なテーマについて研究を行なっています.
興味をお持ちの方はメール等でいつでもお気軽にご連絡ください.
サイトマップ
関連サイト
連絡先
IB電子情報館南棟4F 457室
Phone: 052-789-3310
Fax: 052-789-3807